Graduate School of Science and Engineering Mechanical Engineering
- Course Outline
- Metallic Materials Science Laboratory
- Applied Materials Engineering Laboratory
- Advanced Materials Structural Engineering Laboratory
- Spray and Combustion Science Laboratory
- Heat Transfer Laboratory
- Laboratory of Fluid Mechanics
- Motion and Vibration Control Laboratory
- Manufacturing System and Design Laboratory
- Machine Elements and Tribology Laboratory
- Applied and Engineering Mathematics
- Physics Laboratory
Motion and Vibration Control Laboratory
Website of the Laboratory 【In Japanese】Staff
![Nobutaka TSUJIUCHI [Professor]](/istc/attach/page/TECHNOLOGY-PAGE-EN-52/49774/resize-file/staff_02.jpg)
TSUJIUCHI Nobutaka
[Professor]
| Acceptable course | |
|---|---|
| Master's degree course | ✓ |
| Doctoral degree course | ✓ |
Telephone : +81-774-65-6493
ntsujiuc@mail.doshisha.ac.jp
Office : YM-423
Database of Researchers

ITO Akihito
[Professor]
| Acceptable course | |
|---|---|
| Master's degree course | ✓ |
| Doctoral degree course | ✓ |
Telephone : +81-774-65-6230
Office : YM-421
Database of Researchers
Research Topics
Vibration and noise reduction in electrical appliances and mechanical equipment
- Dynamics of automobiles, motorcycles, and heavy construction machinery
- Dynamics and control of robot
- Human body modeling, biomechanics and dynamic safety analysis
- Matching evaluation of sporting goods to the human body and human dynamics
Research Contents
The Motion and Vibration Control Laboratory conducts research and development on new technologies and new methods
through analytical approaches, numerical simulations, and experiments of a wide range of phenomena associated with
dynamics and their control.
Following are our main themes.
- Construction of sound source model of engine by using inverse-acoustics analysis
- Vibration estimation by Laser Doppler Vibro-meter
- Noise & vibration reduction of washing machine
- Development of vertical seismic isolator table using new crank mechanism
- New type vibration evaluation method for NVH FEM analysis based on Transfer pass analysis (TPA)
- Analysis and evaluation method of tire generated noise
- Development of slope traveling model for crawler vehicles
- High efficiency of automatic digging algorithm for hydraulic excavator
- Direct teaching using inertia sensors
- Application of RRT method for manipulator path planning
- Prosthetic hand control using motion discrimination from EMG signals
- Dynamical effect evaluation of wire walking assist suit
- Construction for control method for residual vibration suppression to linear robot arm
- Sports/human dynamics & biomechanics
- Development & validation of paediatric finite element head model
- Analysis of walking characteristics in microgravity environment using anti-gravity treadmill
- Development of wearable human body measurement system
- Evaluation of influence on lower limbs in gait using load-controlled treadmill
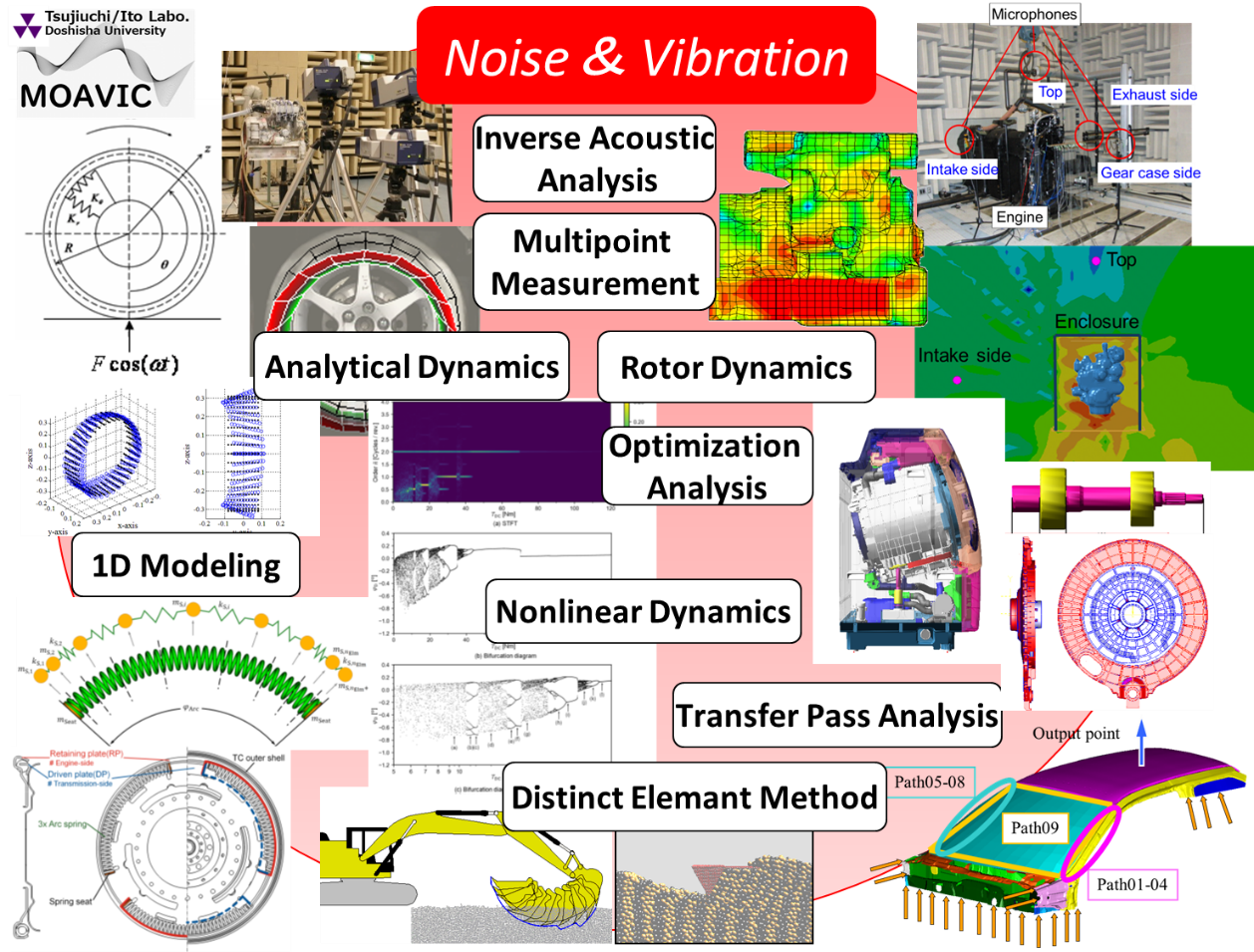
Fig.1 Dynamics of Electric Appliances
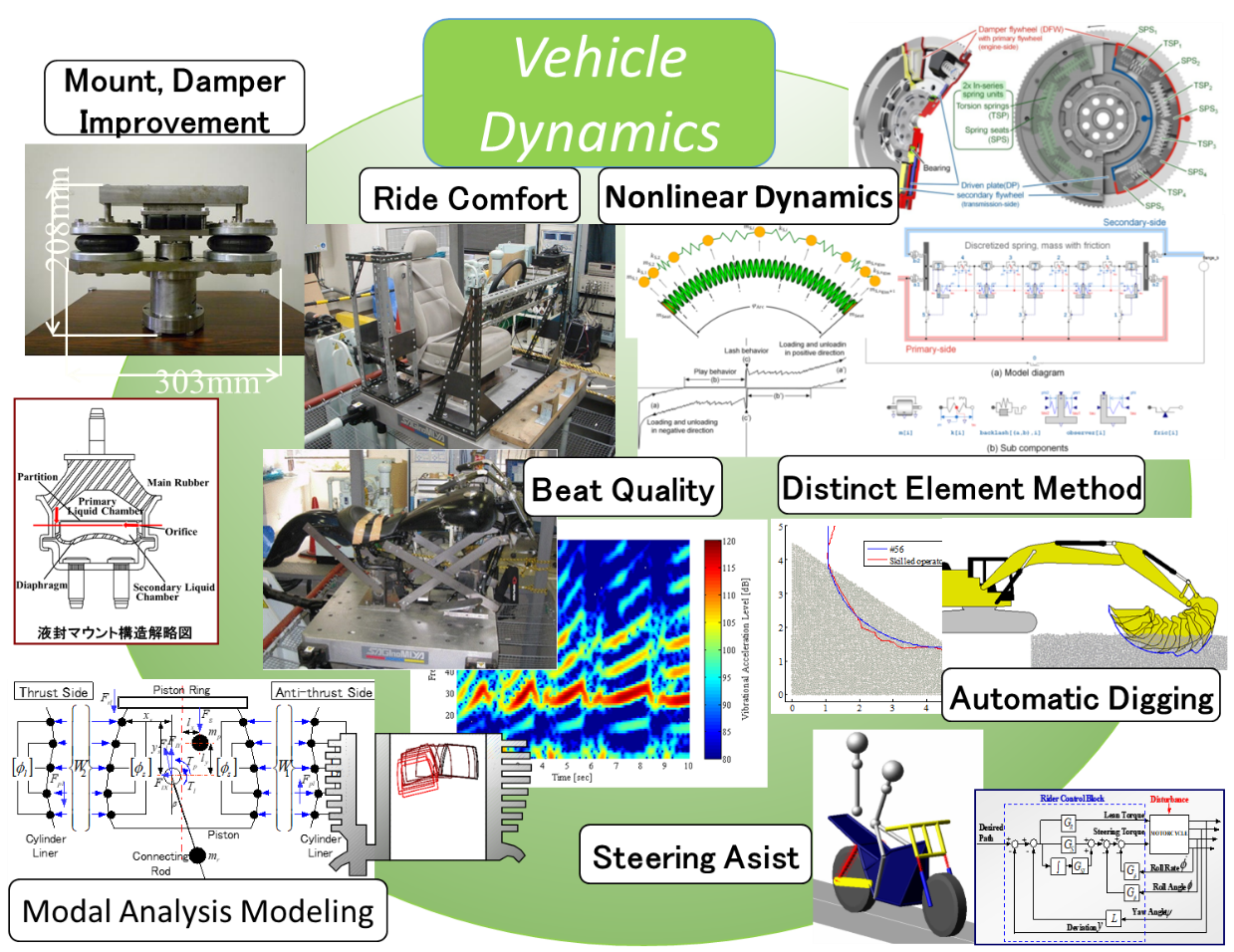
Fig.2 Vehicle Dynamics
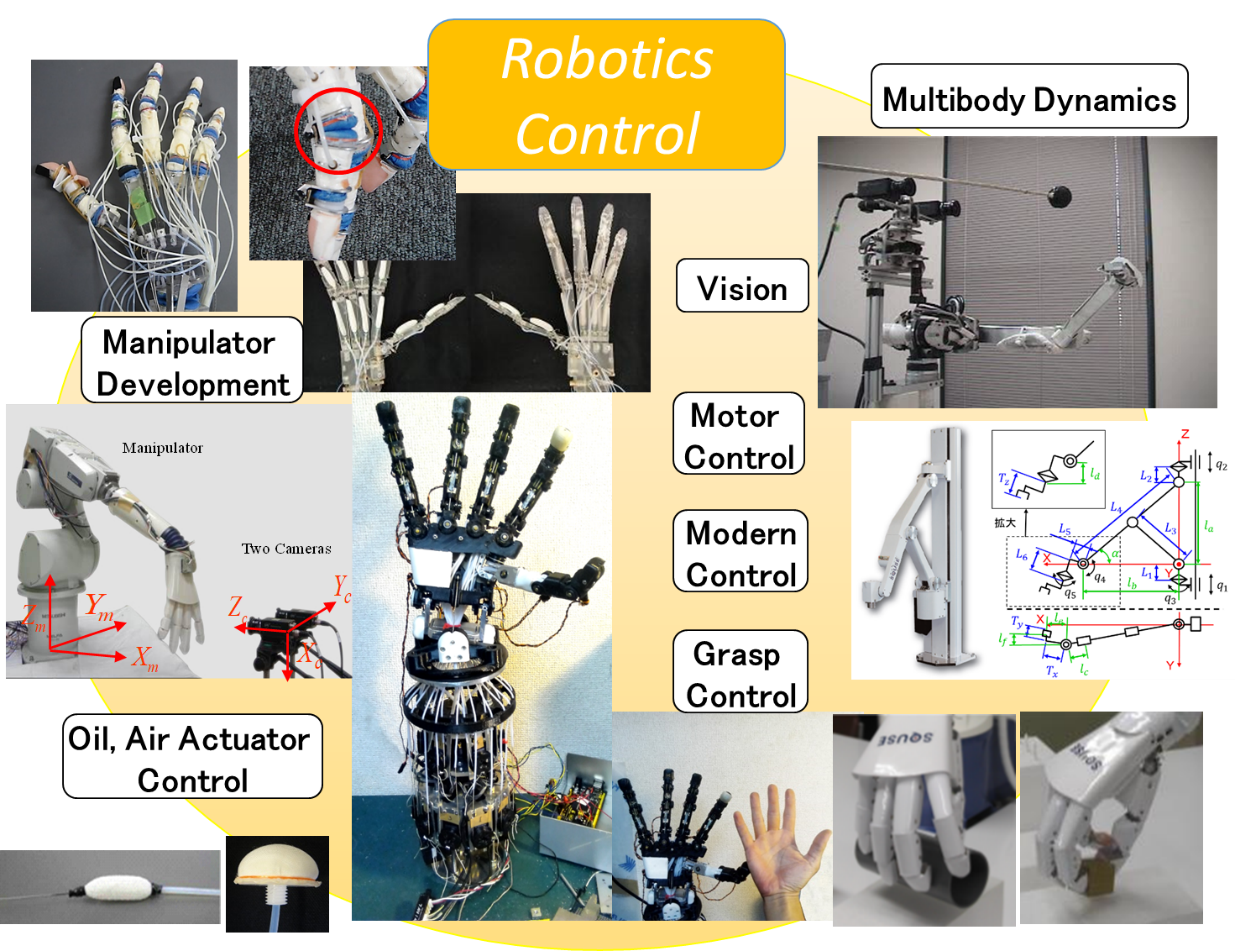
Fig.3 Robotics and Control
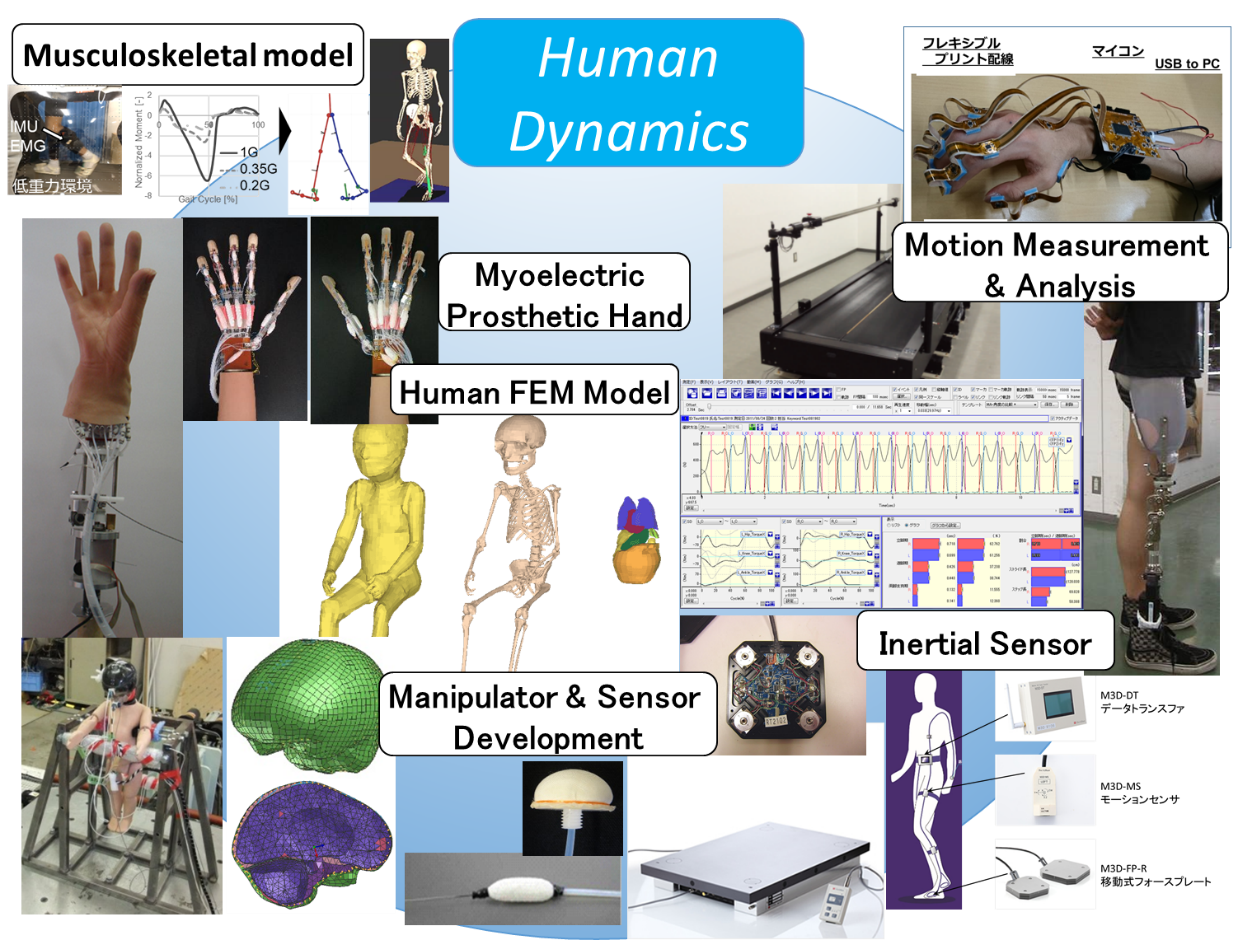
Fig.4 Human body modeling and biomechanics
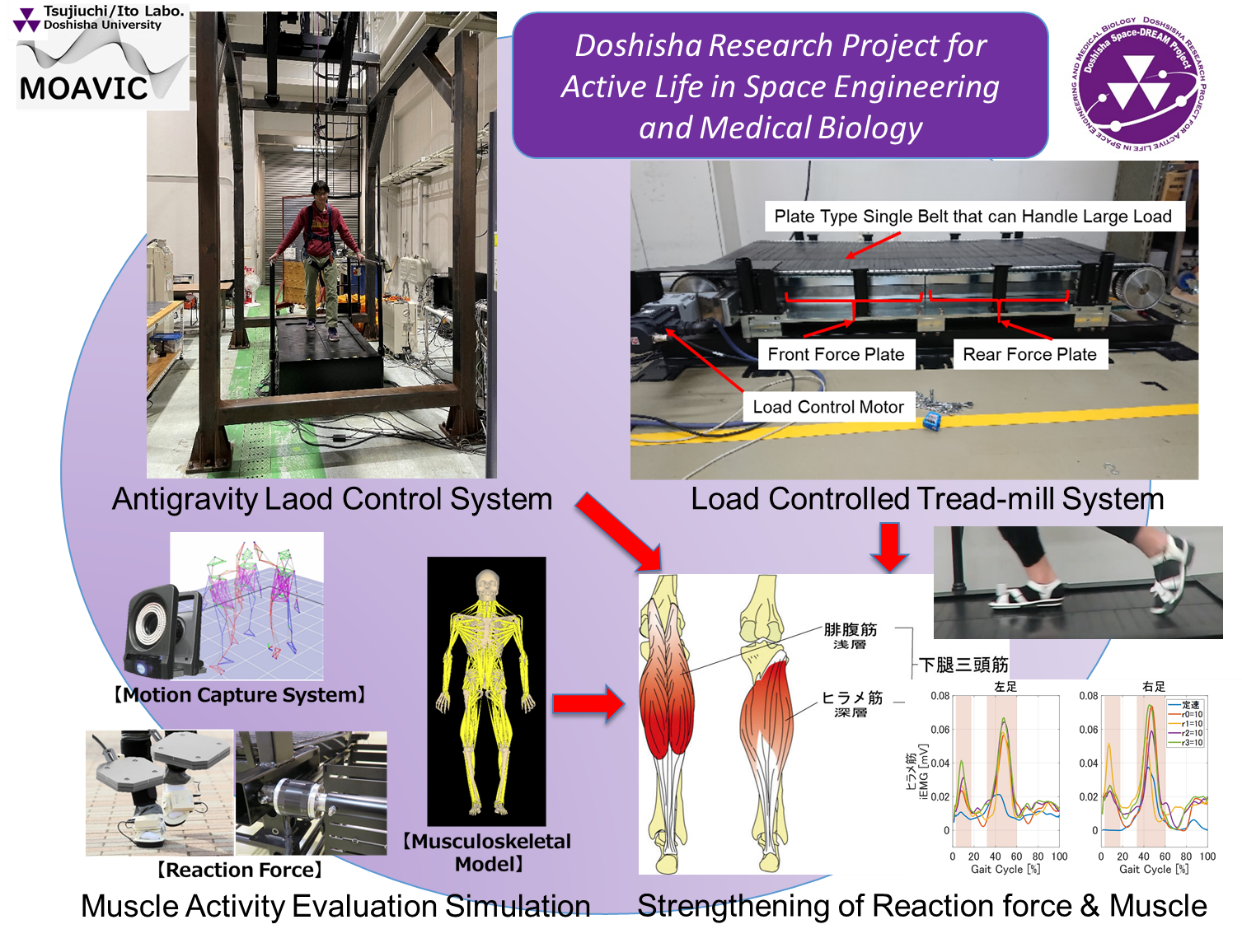
Fig.5 Doshisha DREAM Project
Keywords
- Vibration engineering
- NVH
- Dynamics
- Robotics
- Control
- Human Dynamics
- Sports Engineering
- Human Motion Sensing