Graduate School of Science and Engineering Information and Computer Science
- Course Outline
- Laboratory for Information Theory and its Applications
- Information Systems Laboratory
- Intelligent Information Processing Laboratory
- Intelligent Mechanism Laboratory
- Intelligent Systems Design Laboratory
- Socio-informatics Laboratory
- Co-Creation Informatics Laboratory
- Applied Media Information Laboratory
- Network Information Systems Laboratory
- Intelligent Mechatro-Informatics Laboratory
- Spoken Language Processing Laboratory
Socio-informatics Laboratory
Website of the Laboratory 【In Japanese】Staff

IVAN TANEV
[Professor]
| Acceptable course | |
|---|---|
| Master's degree course | ✓ |
| Doctoral degree course | ✓ |
Telephone : +81-774-65-6699
itanev@mail.doshisha.ac.jp
Office : KC-223
Database of Researchers

KIMURA Tatsuaki
[Associate Professor]
| Acceptable course | |
|---|---|
| Master's degree course | ✓ |
| Doctoral degree course | |
Telephone : +81-774-65-6973
tatkimur@mail.doshisha.ac.jp
Office : KC-222
Database of Researchers
Research Field (A):
Software Agents: Robot Controllers, Car Drivers, and Entities in Multi-agent Systems
Research Topic (A1): Emergence of Social Behavior in Multi-agent Systems
Background
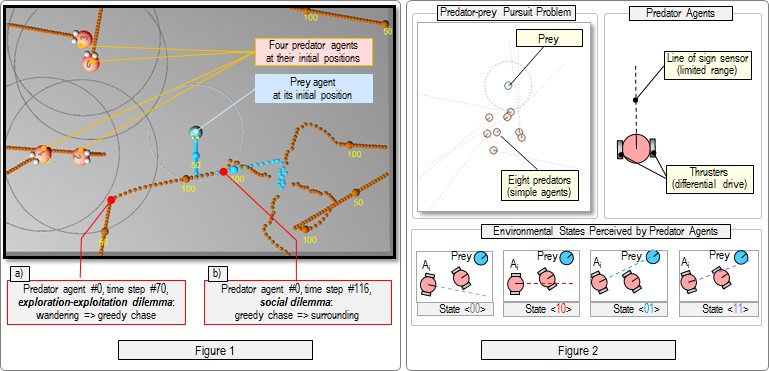
This research is dedicated to what we view as the most interesting features of multi-agent systems (MAS) – namely, that they can solve problems that a single agent cannot. Inspired by the philosophical concepts that “the whole is greater than the sum of its parts” (Aristotle), and the Hegelian “transformation of quantity into quality”, we investigate how a complex, collective (social) behavior of the teams of interacting agents emerges from the individual behavior of relatively simple agents. Especially, we are interested in the predator-prey pursuit problem (PPPP) – a problem that has numerous applications in ecology, robotics, and artificial intelligence – in which a multiple homogeneous predator agents try to capture a prey agent. We are especially interested (i) PPPT with predators featuring omni-directional sensors, continuous moving capabilities, and an evolvable subsumption architecture based on an evolvable set of IF-THEN behavioral rules (Figure 1), and (ii) PPPP with extremely simple predators – modelling the emerging nano- and micro robots – having single line-of-sign sensors, simple moving capabilities (based on two-thruster differential drive), and a simple – purely reactive – architecture that maps the just four perceived environmental states into an amount of power of the two thrusters (Figure 2).
Algorithmic Paradigm
We adopted genetic programming (GP) to evolve the behavior of predator agents in PPPP. Because it evolves the behavior of individual agents as a set of stimuli-response IF-THEN rules, and evaluates the performance of the team of agents, it offers a natural way to bridge the significant semantic gap between the high-level properties of the system and the low-level properties of its entities (agents). Moreover, inspired by strongly-typed programming languages, such as Ada and Pascal, we introduced a strongly-typed GP (STGP) by defining explicit data types to all perception variables and restricting the allowed syntax of the evolved expressions to involve only variables of compatible types. STGP improves the computational effort of evolution by directing the search to (presumably) promising areas of the huge search space. In addition, motivated by the important discovery in molecular biology that it is possible to “inherit something beyond the DNA sequence” (J. D. Watson), we extended the notion of inheritable genotype in GP from the common tree-structured expressions (i.e., DNA) into trees with Boolean flags (histones) associated with the functional nodes (i.e., chromatin: DNA with histones), and proposed an epigenetic programming as an approach in which the expression of the evolved functional genes is explicitly controlled via the co-evolved Boolean values of histones. The resulting phenotypic plasticity yielded an improved computational effort of GP.
Current Research
We are currently interested in a more realistic, three-dimensional implementation of the PPPP comprising simple agents. Additional aspect of realism is the modeling of the Brownian collisions that naturally occur in the environments at nano-scales. Also, we are considering delving into the paradoxical positive effect (that we serendipitously discovered) of the environmental noise on the efficiency of the emergent behavior of agents (dithering).
Research Topic (A2): Evolving Optimal Swimming Gaits of Fish Robot
Background
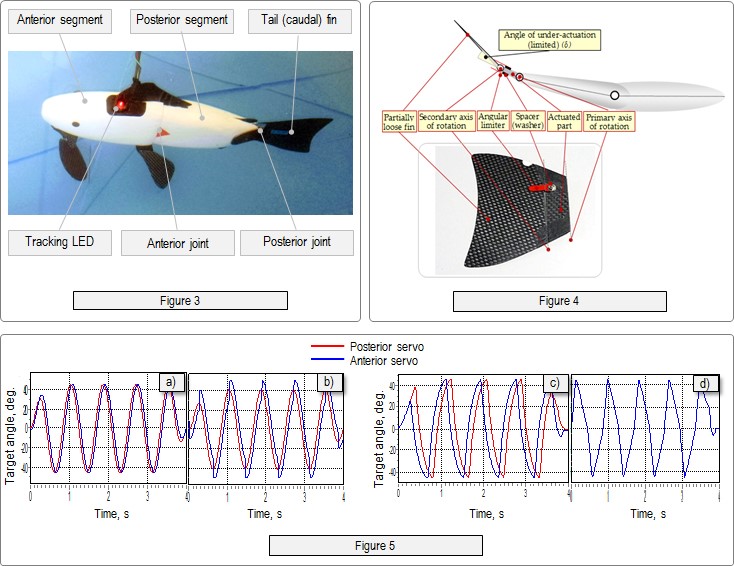
The research on the fish robot (Fishbot, Figure 3) was initially inspired by the recent discovery in live science that the undulatory locomotion gaits of leaving creatures that move in (water, or air) fluids exhibit a rather narrow (optimal) range of the Strouhal number. Initially, we attempted to incorporate such a domain-specific knowledge in order to prune the potentially huge search space of parameters of undulation in order to achieve a computationally efficient optimization of the swimming speed and energy consumption of the bot.
Algorithmic Paradigm
The mentioned above computational efficiency of optimization is important, because, as we intended to bridge the reality gap (caused by the challenge of simulating realistically the fluid vortices), we implemented an evolutionary (e.g. involving many trials) optimization via genetic algorithms in a real time, directly on the physical bot, rather than its software model. Moreover, such an approach also requires appropriate solutions to the typical challenges in evolving physical robots, such as mechanical robustness, power supply, automated fitness measurement, and automated repositioning of the bot between the trials.
Current Research
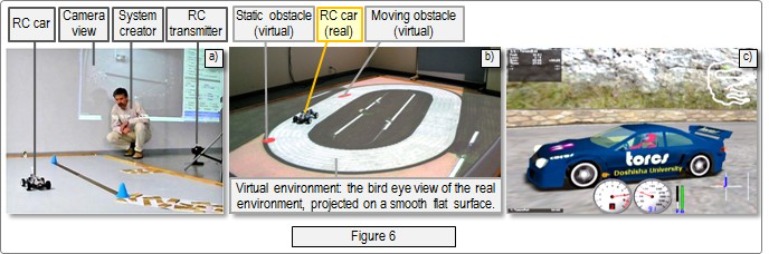
We are mainly focused on the optimization of the bot – from the viewpoint of its swimming speed, and energy efficiency – along the following two relatively orthogonal directions:
b) Control of undulations: optimizing the main parameters of the canonical sinusoidal control (Figure 5a), introducing various non-sinusoidal control patterns – such as hysteretic (Figure 5b), exponential (Figure 5c), triangular (Figure 5d), etc.
Research Topic (A3): Self-driving Cars
Background
We commenced our research on self-driving cars back in 2004, when we “drove” an off-the-shelf scale RC racing car via a PC-running driving agent. The latter used an overhead video camera to obtain its sensory information, and an RC transmitter to convey the throttle-, brake- and steering commands to the car (Figure 6a). As a result of the proposed anticipatory modeling of the car, we realized a stable (non-oscillatory) control even at the maximum speed of the car (2 m/s, scaled up to about 170 km/h) despite the delayed (about 300 ms) sensory feedback from the camera. Also, we achieved both a precise and consistent control by implementing a real-time (sampling interval: 33 ms) video tracking of the car. Moreover, we parameterized (formalized) the driving style (i.e., the racing line, and the speed breakdown along the line) of the car and employed an evolutionary computation (genetic algorithms, and genetic programming) to evolve the optimal driving style – i.e., the style that results in a fastest lap time around various O-, 8-, and S-shaped test tracks. Since then, we have conducted a research on self-driving cars on various platforms and environments, such as scale RC cars in an augmented reality environment (Figure 6b), the open source car racing simulator (TORCS, Figure 6c), and – recently – a fully-fledged drive simulator (Figure 7). The latter allowed us to extend our research beyond the control of the car, and to include both (i) the psychological aspects pertinent to human drivers in self-driving cars, and (ii) the aids that could support the drivers in emergency situations.
Current Research
We are mainly focused on the following three aspects of automated driving: control, human factors, and advanced driving aids, as follows.
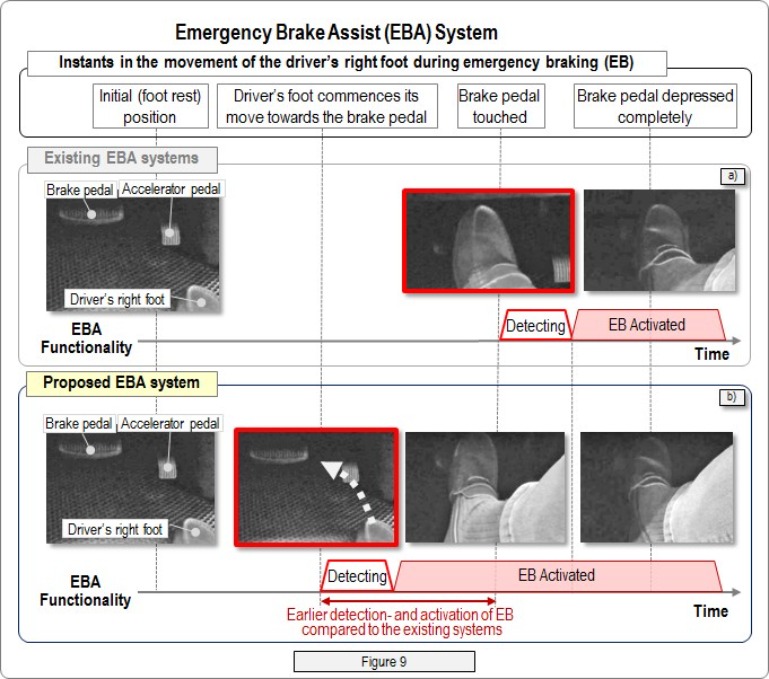
(b) Human factors: It is essential that the human driver in Levels 3 and 4 of automated driving could quickly and safely take over the control of the car when requested. Such a take-over request (TOR) would be a result of either an unrecognized traffic situation by the auto pilot, or a contradictory (or lack of sufficient) sensory information provided to the latter. The psychological phenomena that could compromise the performance of the driver before- or during TOR include cognitive underload, highway hypnosis, automation surprise, and automation startle. We are researching on modalities (text, voice, vibration), and types of human-machine interfaces (HMI) – such as transparent HMI, semantic HMI, personal HMI, and external HMI – that could alleviate the effects of the above-mentioned psychological phenomena (Figure 8).

Research Field (B):
Intelligent Control of Future Wireless Communication Systems
In future wireless networks, referred to as beyond 5G, a vast and diverse array of information and communication devices—including not only smartphones but also Internet-of-Things (IoT) devices, vehicles, drones, and satellites—will connect to the network as “users.” To accommodate this explosive growth in user devices and to ensure efficient and seamless communication, we are conducting research and development on foundational technologies for future communication networks, leveraging a variety of theoretical frameworks, including stochastic modeling, control theory, and machine learning.
Research Topic (B1): Intelligent Adaptive Network Control for the Spatiotemporal Dynamics of Users
At outdoor concerts and sports events, the phenomenon of "hot spots"—where user density is spatially concentrated—is commonly observed. Moreover, the locations of these hot spots change over time due to user mobility. To address such spatiotemporal variations in user distribution, the application of new network systems and control technologies, such as millimeter and terahertz wave communications, beamforming, massive multiple-input-multiple-output (MIMO), reflecting intelligent surface (RIS), and aerial base stations, is expected to provide users with a comfortable communication experience. However, how to control these diverse technologies in real time remains a significant challenge. For example, the use of unmanned aerial vehicles (UAVs) as aerial base stations has recently attracted attention not only for addressing hot spots but also for deployment during disasters or large-scale network failures. However, the optimal deployment of UAVs in three-dimensional space—while considering the communication quality of all users and interference among UAVs—remains a challenging problem. In response, we are conducting research on the deployment and trajectory control of aerial base stations using various techniques, including mathematical optimization, distributed control theory, game theory, and applied probability, to enable adaptation to the spatiotemporal variations of users.

Research Topic (B2): Performance Evaluation of Next-Generation Networks Based on Probabilistic Modeling
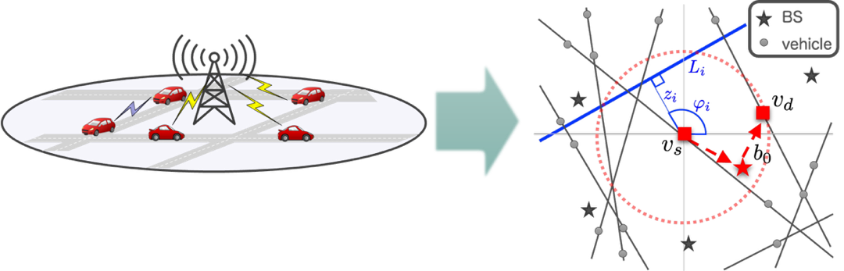
As an example of next-generation wireless communication networks, we have focused on vehicle-to-vehicle (V2V) communication, conducting a theoretical performance evaluation based on stochastic geometry and proposing control methods derived from analytical results. For instance, a cellular vehicle-to-everything (C-V2X) communication network can be modeled as a probabilistic model in which vehicles move along randomly distributed roads, and base stations are distributed according to a spatial point process, as illustrated below. This modeling framework enables a theoretical comparison between cellular-relay-based communication via base stations and direct vehicle-to-vehicle communication. In addition to C-V2X, we are also conducting theoretical performance evaluations of a wide range of emerging network technologies, including millimeter-wave (mmWave) communication networks, non-orthogonal multiple access (NOMA) networks, reconfigurable intelligent surfaces (RIS) networks, and low Earth orbit (LEO) satellite networks.
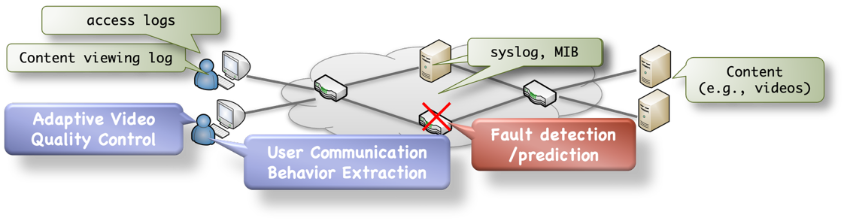
Research Topic (B3): Data-Driven Network Control Based on Machine Learning Techniques